Vivant
- Santé, Médecine et Sciences du Vivant
- Neurosciences & Sciences cognitives
Un robot qui lie la main au cerveau
- Tweeter
-
-
0 avis :

{kind=link}
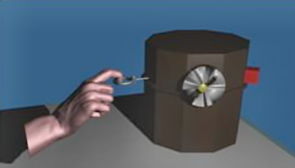
Un chercheur du CESEM développe des modèles 3D comportementaux basés sur les signaux neuronaux pour piloter un bras robotisé de préhension. Objectif : mieux interpréter les neurosciences pour améliorer les prothèses médicales et les préhenseurs industriels.
Comment une main humaine saisit-elle un objet ? Comment le cerveau contrôle-t-il ce geste ? Telles sont les questions que se pose François Touvet, doctorant en 3e année de thèse au sein de l'équipe "Contrôle multi-sensoriel du membre supérieur" du CESEM (Centre d’Etude de la Sensori-motricité), laboratoire de recherche biomédicale en neurosciences de la Faculté de médecine (Universités Paris Descartes et Paris-Diderot). L’acte en soi a l’air simple, pourtant les neurosciences sont encore loin d’avoir percé le mystère de la chaîne d’information nécessaire à la préhension. Elles avancent grâce à cette équipe en testant sur un robot la modélisation du mouvement humain et la façon dont il peut être commandé par le cerveau, confrontant ainsi les différentes approches théoriques, les modèles de fonctionnement du cerveau, et leurs limites.
L’objectif est de coller au plus près à la façon dont une main humaine saisit un objet et d’affiner la connaissance des processus neuronaux mis en jeu dans cet acte de préhension. La complexité vient du fait qu’il s’agit de prendre en compte l’impact de la totalité du bras dans le déploiement de la main et de trouver une modélisation mathématique appropriée.
Ces travaux utilisent des données réelles acquises sur une main saisissant un objet à l’aide d’un Cyber Glove (gant instrumenté dans lequel l’expérimentateur glisse et bouge sa main, et qui mesure la position et l’orientation 3D de la paume, ainsi que les angles de chaque articulation). François Touvet utilise ces données comme entrées du programme informatique, qu’il a développé à l’aide de Matlab, destiné à commander le bras articulé robotisé simulant un bras humain.« Pour les premières campagnes d’essais, je me suis rendu à l’Institut Pprime de Poitiers qui abrite le robot et j’ai testé mes configurations avec l’aide de l’équipe partenaire, afin d’effectuer les ajustements nécessaires entre la simulation et le réel. Aujourd’hui, nous travaillons toujours ensemble, mais à distance : il me suffit simplement de générer les paramètres de consigne de la main et du robot porteur avec mon simulateur et de les envoyer à l’équipe de Poitiers qui les valide sur le robot », explique François Touvet.
Noter cet article :
Vous serez certainement intéressé par ces articles :

Découverte d'un régulateur cérébral impliqué dans des maladies psychiatriques
La complexité du fonctionnement du cerveau révèle bien des surprises. Alors qu’il était communément admis que dans l’activité cérébrale, des familles de récepteurs synaptiques (situés à l’extrémité ...

Les neurones peuvent communiquer comme par wifi
Chez le vers "C. elegans”, modèle en biologie, les neurones peuvent s’activer les uns les autres à distance grâce à de petites molécules. De quoi revoir la façon dont l’information est véhiculée ...

Parler aux enfants dès leurs naissance favorise leur développement cognitif
Une étude réalisée par des chercheurs anglais de l’Université d'East Anglia montre à quel point il est important que les bébés entendent beaucoup de paroles dès leur naissance pour que leur cerveau ...
Recommander cet article :
- Nombre de consultations : 152
- Publié dans : Neurosciences & Sciences cognitives
- Partager :