Avenir
- Nanotechnologies et Robotique
- Robots industriels
Le robot aux mains liées est plus fort
- Tweeter
-
-
0 avis :

{kind=link}
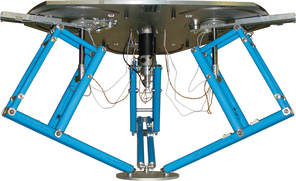
Le manipulateur parallèle de Sébastien Briot est plus efficace que les robots industriels composés d’un bras unique.
Avec ses trois grands bras articulés suspendus à une grande plaque métallique et reliés à leur extrémité à une petite plate-forme centrale, il ressemble un peu à une araignée recroquevillée. Le robot mis au point par Sébastien Briot lors de sa thèse peut soulever jusqu’à 20kg - plus que son propre poids ! Mais surtout, il a permis au jeune roboticien de multiplier les expériences, pour étudier de plus près le comportement d’une espèce nouvelle : les manipulateurs parallèles.
- Plus légers, plus rapides
« Contrairement aux robots composés d’un bras unique que l’on voit souvent dans les usines, dont l’une des extrémités est “libre”, les bras des manipulateurs parallèles, des robots nés dans les années 60, sont liés à leurs deux extrémités. Ils forment des chaînes fermées : on peut partir de la base, passer par un bras puis par un autre pour revenir à la base sans revenir en arrière. Cela les rend plus rigides. » Imaginez-vous en train de soulever un poids de 20kg. Avec une main, cela fait reposer beaucoup d’efforts sur votre poignet et votre coude. Si vous formez une boucle en joignant vos deux mains en une petite plate-forme, l’effort sera mieux réparti. « Ces robots parallèles sont aussi plus légers, donc plus rapides. En laboratoire, certains prototypes atteignent les 100G, plus de dix fois l’accélération d’un avion de chasse ! »
- Les mains scotchées
Bien sûr, cette médaille d’efficacité a son revers. Les deux mains attachées ensemble, vos mouvements seront beaucoup plus limités. Les manipulateurs parallèles n’échappent pas à cette contrainte. « Leur espace de travail est plus restreint, et leurs lois de commande sont plus complexes. Pour effectuer une simple translation vers le haut ou vers la droite, il ne suffit pas de bouger l’un des bras dans la direction souhaitée, car ils sont tous liés ! Pendant ma thèse, j’ai cherché à pallier cet inconvénient en séparant certains mouvements d’une façon nouvelle. Mon robot pouvait effectuer des translations simples de haut en bas grâce à un moteur puissant capable de monter et descendre la plate-forme qui supporte la charge le long d’un axe vertical. Et pour les déplacements horizontaux, il fallait combiner les mouvements des bras, qui ne pouvaient que tourner sur eux-mêmes. » Cette configuration est même économique, car les bras supportent moins de poids et peuvent être équipés de petits moteurs. Or, pour les robots comme pour les voitures, plus un moteur est puissant, plus il est cher !
« J’ai aussi analysé un autre problème, qui apparaît sur tous les manipulateurs parallèles. C’est l’existence de mouvements non désirés dans certaines zones de l’espace de travail. On les appelle des singularités. Par exemple, dans certaines positions, alors qu’on voudrait immobiliser le robot, la plate-forme peut toujours bouger. J’ai cherché à identifier les positions qui posent ce type de problèmes, les zones à éviter, ou à traverser sous certaines conditions de vitesse et d’accélération. »
Aujourd’hui, le robot de Sébastien Briot, dont la réalisation a demandé près de deux ans et dont l’architecture a été brevetée, est reparti en pièces détachées, utilisées pour d’autres travaux. « Il est impossible de conserver tous les prototypes, les pièces coûtent trop cher, les matériaux sont recyclés dans d’autres projets ! » Mais les publications dans les revues scientifiques restent. La thèse a même reçu en 2007 le prix de la meilleure thèse, décerné par le groupement de recherche CNRS en robotique. Et à Nantes, le roboticien continue à apprivoiser les robots parallèles, qui fabriqueront peut-être nos voitures demain.
Noter cet article :
Vous serez certainement intéressé par ces articles :

Verdie, le robot jardinier polyvalent
La robotique prend ses aises et ce, aussi bien dans le domaine professionnel que dans celui du grand public. En plus des robots aspirateurs et autres systèmes visant à simplifier les corvées ...

Un robot pour la cueillette des mirabelles
Un nouveau chapitre s'ouvre pour la cueillette des mirabelles en Lorraine. Un robot prénommé Syracus vient de faire ses premiers tests dans un verger de la Meuse. Après 18 mois de recherche et ...

Edito : Et si l’arrivée massive des robots allait permettre de garantir une meilleure retraite et un meilleur système de santé…
Cette semaine, alors que se tient à Las Vegas le salon high-tech CES 2024, je reviens sur les récentes avancées en robotique. Depuis quelques mois, nous le voyons bien, dans tous les domaines, les ...
Recommander cet article :
- Nombre de consultations : 335
- Publié dans : Robots industriels
- Partager :